
【教程】BiliDownloader新版交互视频下载教程
1. 不同之处
旧版的交互视频下载(V1.5及以前)功能的先决条件是交互视频不能是无限循环的。因为旧版互动视频下载窗口弹出前,必须对所有的视频节点进行递归遍历,因此一旦视频出现无限循环,软件将会一直递归直到递归操作溢出导致错误结束;新版(V1.6版本及以后)主要采用手动探查方式,因此可以规避这一问题。
在交互视频分支数量过于庞大时,旧版的交互视频下载界面弹出时间会非常长!实测有6个分支四个选项的情况下,需要等待至少40分钟的时间才能完成探查,在探查中甚至会出现错误导致探查不全;而新版交互视频在手动探查的前提下,可以使用单个节点递归遍历功能,此方法可大大减少时间,让使用者能够更快地获取想要下载的节点分支视频。
旧版的交互视频只能显示节点名称,所以不能直观的看到各个节点所对应的具体选项信息。新版加入了缩略图显示功能,能够比较直观的查看节点对应选项信息。
相较于旧版,新版本加入了多线程节点递归探查功能,递归遍历节点的速度有大幅度提升。
2. 界面功能总述在探查框内输入互动视频所在的B站网页地址,点击资源探查并选择好有关的配置,点击下载资源后,会自动弹出互动视频下载对话框,如以下图片所示, ...
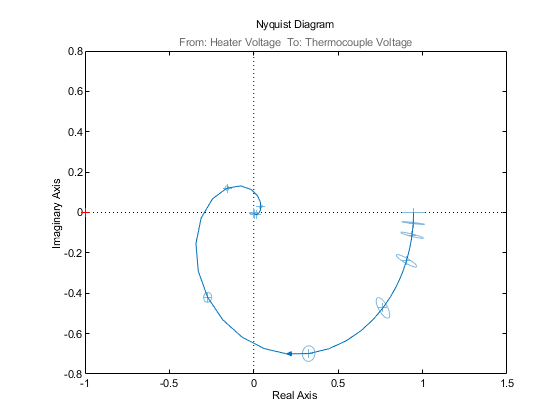
【考研自控】题型解法一:Nyquist曲线图与判据
【考研自控】题型解法一:Nyquist曲线图与判据
本题一般会给一个开环传递函数G(s),根据开环传递函数画Nyquist曲线。
步骤一:分析开环传递函数得到的开环传递函数一般如下所示:
$$G(s) = {{K\mathop \prod \limits_{i = 1}^m ({\tau _i}s + 1)} \over {{s^v}\mathop \prod \limits_{i = 1}^n ({T_i}s + 1)}} = {{K({\tau _1}s + 1)({\tau _2}s + 1) \cdots } \over {{s^v}({T_1}s + 1)({T_2}s + 1) \cdots }}$$
当你看到传递函数需要画奈氏图的时候,你需要一眼分析出以下信息:
此传递函数为几型系统:由开环传递函数中的v确定;
开环传递函数的零极点与个数:
零点:令({\tau _i}s + 1) = 0 \Rightarrow s = - {1 \over { {\tau _i} } }.(i = 1,2, \cdots ,m);
极点:令({T_i}s + 1) = 0 \Ri ...
【教程】如何使用BiliDownloader下载器
1. 软件界面
2. 系统环境准备2.1 Windows操作系统准备
将下载好的压缩包进行解压即可;
可执行程序为解压目录内的biliDownloader_GUI.exe文件;
若您需要更新本程序,请直接通过压缩包覆盖根目录内原文件即可。
2.2 Ubuntu Desktop操作系统方法一:直接下载运行包使用(没有桌面LOGO图标):
下载程序后使用以下命令进行解压:
1tar -xzvf biliDownloader-ubuntu.tar.gz
运行下列命令搭建软件运行环境:
12sudo apt-get install libxcb-xinerama0sudo apt-get install ffmpeg
在解压目录内运行以下命令即可打开程序:
1./biliDownloader_GUI
方法二:使用deb安装包方式安装(有桌面LOGO图标):
运行以下命令搭建软件基本安装环境:
12sudo apt-get install libxcb-xinerama0sudo apt-get install ffmpeg
下载deb安装包到本地,使用dpkg进行安装:
1su ...
【教程】如何获取B站用户Cookie
第一步:打开BILIBILI弹幕视频网站,并且确保已经登录了您的账户
第二步:选中浏览器窗口的情况下,按下键盘上的F12按键进入测试界面,并选中“Network”选择夹
第三步:选中浏览器窗口的情况下,按下键盘上的“Ctrl + R”键,并将列表往上拖
第四步:选中第一个“www.bilibili.com”选项,并选择右侧“Headers”选项卡
第五步:在选项卡中的“Request Headers”-“cookie”中找到我们的cookie
cookie:后的“buvid…….”即是我们需要的cookie。
【学术】4-麦克纳姆轮平台运动学建模
1. 单个麦克纳姆轮运动模型麦克纳姆轮由一个轮毂与多个辊子构成的异形轮,其中麦克纳姆轮轮轴与辊子滚轴夹角为45°。如图1.1(a)所示,在麦克纳姆轮转动时,辊子将与地面进行摩擦并产生特殊的速度分量{v_{ir}},为垂直于辊子的速度[1]。
可以根据图1.1(b)可以计算出车轮i产生的前向速度分量{w_{Ei}}与自由辊子与地面所接触的切向速度{v_{ir}},并满足公式(4-1)。$$
{v_{ir}} = \frac{1}{{\cos {{45}^ \circ }}}{r_r}{\omega _i},\:{w_{Ei}} = {r_i}{\omega _i},\:i = 1,2,3,4\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:(4-1)
$$同时根据图1.1(b)可以求出单个轮子的平面坐标系{S_i}{P_i}{E_i}上的速度分量,他们分别用{w_{Si}}与{w_{Ei}}来表示,并整理出式(4-2)。$$
\left[ {\begin{array}{*{20}{c}}
{{v_{Si}}}\\
{{v_{Ei}}}
\end{array}} \ ...

【Java学习】Java入门笔记1
Java学习笔记(1)1.1 什么是JDK、JRE、JVMJVM(Java Virtual Machine): Java虚拟机,简称JVM,是运行所有Java程序的假象计算机,是Java运行环境,同时也是Java最具吸引力的特征之一。我们编写的Java代码都将运行在JVM之上。
JRE(Java Runtime Environment):是Java程序的运行环境,包含JVM和运行时所需要的核心类库。
JDK(Java Development Kit):是Java程序开发工具包,包含JRE和开发人员使用的工具。
我们想要运行一个已有的Java程序,那么只需要安装JRE即可。
我们想要开发一个全新的Java程序,那么必须安装JDK。
1.2 环境配置JDK下载地址:官方下载安装即可
1.3 第一个Java程序:HelloWorld12345public class HelloWorld { public static void main(String[] args){ System.out.println("Hello, World!&qu ...

【学习手记】基于AT89C52单片机的PID直流电机控制系统仿真
1. 引言有刷直流电机控制系统是指对有刷电机的启动、加速、运转、减速及停止进行的控制的一种系统。直流电机发展起步于二十世纪七八十年代,MAC无刷直流电机问世,带动了直流电动机控制技术在国际范围内的发展。我国国内也开始对直流电机展开广泛研究,先后推出了方波无刷电机、正弦波直流电机等典型的直流电机[1]。如今不同的电机控制方法开始出现,其中以矢量控制、PID控制、模糊控制和鲁棒控制最为常用。在工业生产生活中,直流电机控制系统主要应用于交通、智能制造、能源开采和尖端控制等领域[2]。PID控制是电机控制中不可获取的一种控制算法,实现简单,控制精度好,稳定性高,经常运用在各种加工机床等生产设备中。使用PID算法对PWM脉宽进行调制是一种很好的有刷直流电机控制的解决方案,在本方案中本文将使用AT89C52平台进行仿真,AT89C52是基于8051框架下构建的单片机芯片;其价格低廉,开发方便,稳定性较好,经常运用于嵌入式电机控制系统中。
2. 有刷直流控制系统的设计本文所介绍的基于AT89C52单片机的PID直流电机控制系统设计过程主要分为MATLAB建模、Proteus硬件电路的设计以及基于C5 ...